
Chronological (reverse) list of projects
CO:=coordinator (leader of multi-team project)
PI :=Principal Investigator (PI* indicates PI of organization in a multi-team project)
### funding obtained as proposal lead of project or organization.
At Technology for AeroSpace Control ltd (from August 2020):
At University of Bristol (from October 2013 to August 2020, about 1.8M€ in external funding to my organization as PI):
At Deimos Space (from January 2006 to August 2013, about 14M€ in external funding as CO / PI, about 2.9M€ to my organization):
CO:=coordinator (leader of multi-team project)
PI :=Principal Investigator (PI* indicates PI of organization in a multi-team project)
### funding obtained as proposal lead of project or organization.
At Technology for AeroSpace Control ltd (from August 2020):
- ...
At University of Bristol (from October 2013 to August 2020, about 1.8M€ in external funding to my organization as PI):
- Nov 2019. "GNC system framework for re-usable space transportation systems (GNC4REST)". PI*. Total Consortium: 300,000€ (UoBristol: 125,000€). ESA-ESTEC TRP
- Dec 2018. "Enhanced Techniques for AOCS GNC functional verification (AOCS-EV)". PI*. Total Consortium: 500,000€ (UoBristol: 120,000€). ESA-ESTEC TRP
- Dec 2018. "Integrated Multi-Actuator CONtrol System for Payloads LoS and Satellite Attitude Pointing (MACON)". PI. Total: 160,000€. Airbus-Friedrichshafen (DE)
- Sept 2017. "Resilient Descent & Landing Design and Analysis for Spacecraft Exploration (PHOBOS-D&L)". PI. Total: £63,000. EPSRC DTP award
- Feb 2017. "Advanced Flight Control System Design With Active Load & Relief Capabilities (TAILOR)". PI*. Total: 90,000€ + £14,183. DLR-Bremen (ESA-ESTEC NPI) + EPSRC DTP
- April 2016. "Robust and Nonlinear Guidance and Control for Landing on Small Bodies (NTSP-2)". PI*. Total Consortium: £110,000 (UoBristol: £55,000). CEOI-ST / UK Space Agency
- Sept 2015. "Validation Integrated Safety-Enhanced Intelligent Flight Control (VISION)". PI*. Total Consortium: 3,621,630€ (UoBristol: 350,126€). EU H2020 Mobility-for-Growth
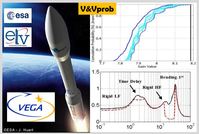
- Aug 2015. "Analytic Stochastic & Time Varying Mu Analysis for the VEGA GNC (VVprob-II)". PI. Total: 30,000€. ESA-ESTEC Expro
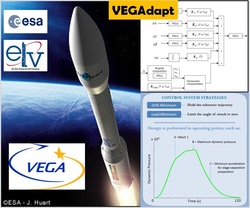
- Jun 2015. "Robust & Adaptable Launcher TVC Control for VEGA Evolution (VEGAdapt)". PI. Total: 90,000€ + £14,183. ESA-ESTEC NPI + EPSRC DTP
- Jun 2015. "Flutter Free Flight Envelope Expansion for Economical Performance Improvement (FLEXOP)". PI*. Total Consortium: 6,692,164€ (UoBristol: 649,968€). EU H2020 Aeronautics
- Jun 2014. "Analytic Stochastic & Time Varying Mu Analysis for the VEGA GNC (VVprob)". PI. Total: 60,000€. ESA-ESTEC Expro
At Deimos Space (from January 2006 to August 2013, about 14M€ in external funding as CO / PI, about 2.9M€ to my organization):
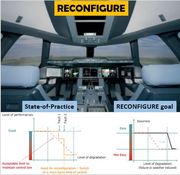
- Sept 2012. "Reconfiguration of Control in Flight for Integral Global Upset Recovery (RECONFIGURE)". CO. Total Consortium: 5,579,613€. EU FP7 Aeronautics
- Jan 2012. “Workshop on Industrial and Academic Experience in Aerospace Fault Detection and Diagnosis”. PI. Total: $28,000. IEEE CSS Outreach Fund
- Dec 2011. "UAV Based Space Technology Investigation (PERIGEO)". CO of WP2 Total Consortium: 18,000,000€ (total for WP2: 4,000,000€). Spanish CDTI
- Jun 2010. "Robust Flight Control System Design Verification & Validation Framework (RFCS)". CO. Total Consostium: 450,000€. ESA-ESTEC TRP
- Jul 2009. "Main Stage Propulsion Technology, Period 2, Health Monitoring System Activities (SCORE-FDI)". PI. Total: 100,000€. ESA FLPP
- Feb 2009. "Main Stage Propulsion Technology, Health Monitoring System Activities (HTE-HMS)". PI. Total: 90,000€. ESA FLPP
- Feb 2009. "Advanced Re-entry Flying Qualities Analysis Framework (FQFW)". Total: 350,000€. (proposal PI* for WP : 150,000€). ESA-ESTEC TRP
- Oct 2008. "Advanced Fault Diagnosis for Sustainale Flight Guidance And Control (ADDSAFE)". CO. Total Consortium: 3,662,624€. EU FP7 Aeronautics
- May 2008. "Modern Control Techniques Applied to Satellite FDIR (SATFDI)". PI*. Total: 350,000€ (Deimos: 100,000€). ESA-ESTEC TRP
- May 2007. "Linear Parameter Varying Modeling, Analysis and Design (LPVMAD)". CO. Total Consortium: 300,000€ . ESA-ESTEC TRP
Projects descriptions (at University of Bristol)

|
RECONFIGURE [Jan 2013 - Jun 2016] COMPLETED
|

|
V&Vprob [Jun 2014 - Dec 2015] COMPLETED
|


|
FLEXOP [Jun 2015 - Nov 2019] COMPLETED
|

|
VEGAdapt [Jun 2015 - Oct 2019] COMPLETED
|


|
VISION [Jan 2016 - Aug 2019] COMPLETED
|

|
NTSP-2 [Apr 2016 - Apr 2017] COMPLETED
|

|
Phobos-D&L [Sept 2017 - Nov 2020] DISCONTINUED
"RESILIENT DESCENT & LANDING DESIGN AND ANALYSIS FOR SPACECRAFT EXPLORATION" This PhD builds on the NTSP-2 UKSA study but focus on the definition of a guidance and control (G&C) integrated design and analysis framework capable of robustly adapting to nonlinear issues such as degradation and failures
Analytical techniques for modelling and analysis of epistemic and aleatory mission effects (including degradation and malfunctions) will be considered in the pursuit of reconciling the design and the analysis processes. The example of descent and landing on the Martian moon Phobos will be used as both a strategic and archetypal study case –the developed design and analysis methods and tools will be applied to ADS-STV nonlinear, high-fidelity functional engineering simulator (FES) for this mission (which is currently being evaluated as ESA’s next exploration mission). |

|
TAILOR [May 2017 - May 2020] COMPLETED
“ADVANCED FLIGHT CONTROL DESIGN WITH ACTIVE LOAD AND RELIEF CAPABILITIES” A ESA-ESTEC Network Partnering Initiative (NPI), jointly funded by DLR/ESA/UoB and with additional (fees-only) EPSRC funding.
The high-level goal of this activity is to develop and validate modeling and (guidance and control) design methods for the management of integrated aero-elastic loads for reusable launch vehicles (RLVs) in atmospheric flight. The type of reference mission to be studied at simulation level covers the ascent up to landing for a slender, highly-flexible RLV under high load conditions from external winds, manoeuvres, and coupled flight mechanics with aero-thermo dynamics. |
|
MACON [January 2019 - December 2022]
“INTEGRATED MULTI-ACTUATOR CONTROL SYSTEM for PAYLOAD LoS and SATELLITE ATTITUDE POINTING” Funding from Airbus-Friedrichshafen, Germany (ADS-FDH) for a joint PhD.
The aim of this PhD is to investigate advanced control design techniques and architectures for the Multi-Actuation/Multi-Body spacecraft that will be necessary to fulfill the challenging scientific objectives of future observation missions (characterized by many, small and large, angle slew maneouvers and possibly different on-board payload instruments with a common focusing device). The application study case is based on the ATHENA mission (http://sci.esa.int/athena/59896-mission-summary/). This study case is developed with support from ADS-FDH and is the selected reference study case as ATHENA is a general 12 DoF multi-actuator and multi-body control problem for the rigid body case (larger number of DoFs for the flexible). It has reaction wheels and a hexapod as actuators, and it can be modelled as a multi-body system (main body and focusing device) with complex spacecraft body interconnections and disturbances. |



|
AOCS-EV [March 2019 - September 2020]
“ENHANCED TECHNIQUES for AOCS GNC FUNCTIONAL VERIFICATION” An ESA-ESTEC Technology Research Project led by SENER (Spain) and participation of TASC and the University of Exeter (UK), with additional support by the University of Stuttgart (Germany).
AOCS Enhanced Verification (AOCS-EV) is a multidisciplinary activity with the aim to enhance future AOCS V&V processes. The ultimate goal of the project is to reduce future missions AOCS Verification and Validaiton (V&V) cost and increase AOCS quality and robustness. The main objectives of the project are to:
|


|
GNC-RLV [December 2019 - December 2020]
“GNC SYSTEM FRAMEWORK FOR RE-USABLE SPACE TRANSPORTATION SYSTEMS” An ESA-ESTEC Technology Research Project led by Embotech (Swizterland) and participation of TASC and Ariane Group (France).
The aim of this project is to develop a robust and adaptable Guidance and Control (G&C) architecture for reusable first stages of a future space transportation system. The main objectives of the project are:
|