
At TASC we have a very strong application-oriented research expertise as indicated by the Technological Readiness Level (TRL) range of our (past and current) projects, which cover:
From TRL 3 (i.e. using high-fidelity, nonlinear simulators developed by industry or of an industrial-standard):
From TRL 3 (i.e. using high-fidelity, nonlinear simulators developed by industry or of an industrial-standard):
To TRL 6/8 (i.e. flight tests in piloted and remotely operated vehicles):
Below you can find more details on our flight test experience:
- 2009 Advanced fault detection scheme in DLR's ATTAS manned aircraft
- 2016 Advanced robust controller in JAXA's MuPAL-alpha manned aircraft
- 2018 Robust controller in NDUT's small solid rocket
- 2019 Advanced robust controller in DLR's EAGLE autonomous VTOL demonstrator
Below you can find more details on our flight test experience:
2009 Flight testing of advanced fault detection scheme in DLR's ATTAS manned aircraft

Fig. 1. DLR Advanced Technologies Testing Aircraft (ATTAS)

Fig. 2. DLR ATTAS configuration
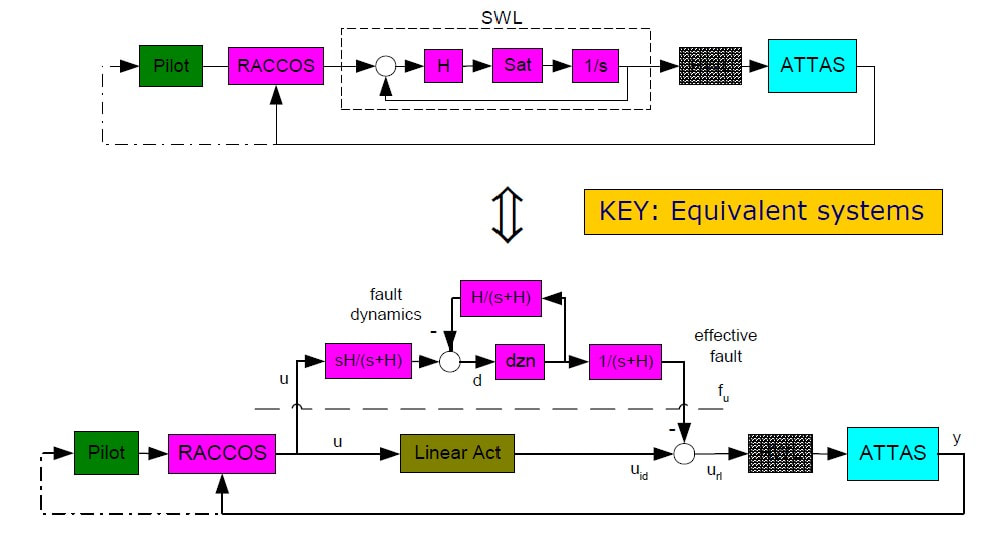
Fig. 3. Actuator saturation as an "effective" fault unknown input
|
This work was performed at Deimos Space S.L.
In collaboration with DLR-Braunschweig, we had the opportunity to verify and validate a fault diagnosis algorithm designed using H-infinity optimization in their Advanced Technologies Testing Aircraft (ATTAS), see Figs 1 and 2. The robust FDI scheme was designed to detect and isolate actuator rate saturation in the lateral/directional actuators. The effects of this critical non-linearity were modeled as an equivalent "effective fault", see Fig. 3, which then could be detected and isolated by our FDI scheme, some results are given below in Fig. 4. The incremental V&V activities went from verification in a high-fidelity, nonlinear model of ATTAS, to validation in DLR's piloted flight simulator, the use of real flight data, and subsequently flight testing (this later results were not published). Publication: Kerr, M.L., Marcos, Peñín, L.F., Brieger, O., Postlethwaite, I., Turner, M., “Piloted Assessment of a Fault Diagnosis Algorithm on the ATTAS Aircraft,” AIAA GNC Conference, Chicago, USA, August 2009 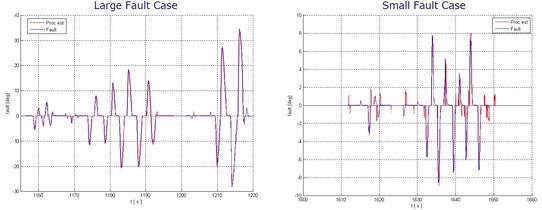
Fig 4. Strong and Small fault cases results (see publication for details)
|
2016 Flight testing of advanced controller in JAXA's MuPAL-alpha manned aircraft

Fig. 5 JAXA Multi-Purpose Aviation Laboratory-α (MuPAL-α)

Fig 6. JAXA MuPALα in Aircraft-In-The-Loop (AIL) configuration

Fig 7. Ground-track flight campaign 1 (Dec'16): day 1 and 2
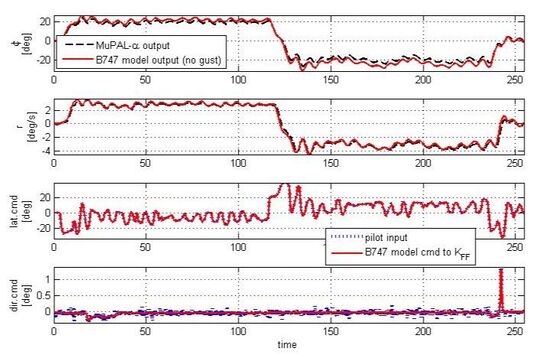
Fig. 8 Flight test results (1st Day): 360 degrees steady-turns at 20 degrees bank angle and 110 knots airspeed
|
This work was performed at the University of Bristol.
In collaboration with JAXA-Chofu (Tokyo), and as part of the joint EU-H2020 & Japan-NEDO project VISION, we had the opportunity to verify and validate up to flight testing a series of advanced robust controllers as well as fault tolerant controllers (FTC) in JAXA's Multi-Purpose Aviation Laboratory-α (MuPAL-α), see Fig. 5. The following is a list of the designs performed and their V&V testing, either flight testing (FC-1) or Aircraft-In-the-Loop (AIL-#) --a type of Iron Bird validation with the full aircraft parked on the hangar, see Fig. 6:
5.b Manually scheduled structured H-inf active-FTC Y* 5.c Self-scheduled structured H-inf active-FTC Y* 5.d LPV active-FTC Y* The ground tracks for the two days of the Dec'16 flight campaign (FC-1) and the results are shown on Fig 7 and 8 respectively. And example of the design interconnections are given in Fig. 9 below (left for a passive-FTC Y* controller and right for an active-FTC version). Publications: Marcos, A., Sato, M., “Flight Testing of an Structured H-infinity Controller: An EU-Japan Collaborative Experience,” 1st IEEE Conference on Control Technology and Applications (2017 CCTA), Hawai'i, US, August 2017 Marcos, A., Sato, M., “Robust Model-Matching Controller Design Using Matlab hinfstruct Command,” The 4th Multi-Symposium on Control Systems (SICE-MSCS17), Okayama, Japan, March 2017 Waitman, S., Marcos, A., Sato, M., “Design and Hardware-In-the-Loop validation of a Fault-Tolerant Y* flight control law,” 4th International Conference on Control and Fault-Tolerant Systems (SYSTOL19), Casablanca, Morocco, September 2019 Takase, R., Marcos, A., Sato, M., Suzuki, S., “Hardware-In-The-Loop Evaluation of a Robust C* Control Law on MuPAL-a Research Aircraft,” 21st IFAC World Congress, Berlin, Germany, July 2020 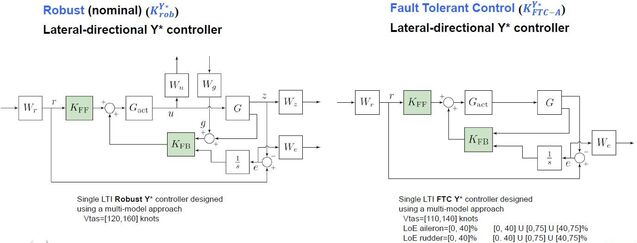
Fig 9. Design interconnections: robust (passive-FTC) [left] and active-FTC [right] Y* controllers
|
2018 Flight testing of advanced controller in NDUT's small solid test rocket
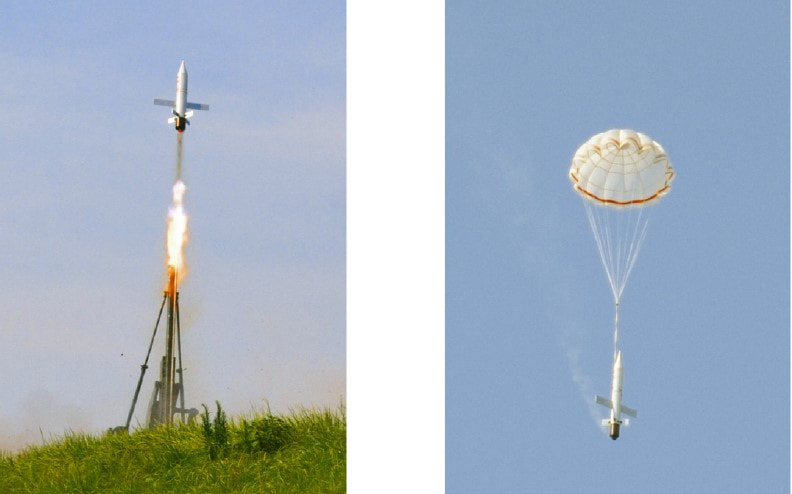
Fig 10. NDUT small solid rocket: launch [left] and recovery [right]
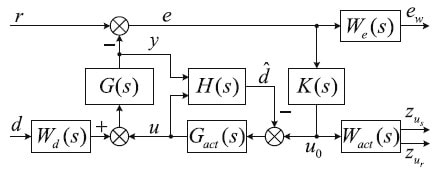
Fig 11. Enhanced Disturbance Rejection control design interconnection.
|
This work was performed at the University of Bristol.
In collaboration with NDUT, after a one-year visit by Mr. Li Tong during his PhD, on his return to NDUT and as a conclusion of the collaboration, an enhanced disturbance rejection controller design obtained using H-infinity optimization was tested in NDUT's small solid test rocket --a type of sounding rocket for experimental testing (see the launch and recovery for our flight test in Fig. 10 and the design interconnection in Fig. 11). The incremental V&V activities included nonlinear model simulations, hardware-in-the-loop (HIL) testing and a flight test, see results below in Fig. 12. Publication: Tong, L., Marcos, A., Zhang, S., "Enhanced disturbance rejection control based test rocket control system design and validation,” ISA Transactions, January 2019, vol.84, pp.31-42 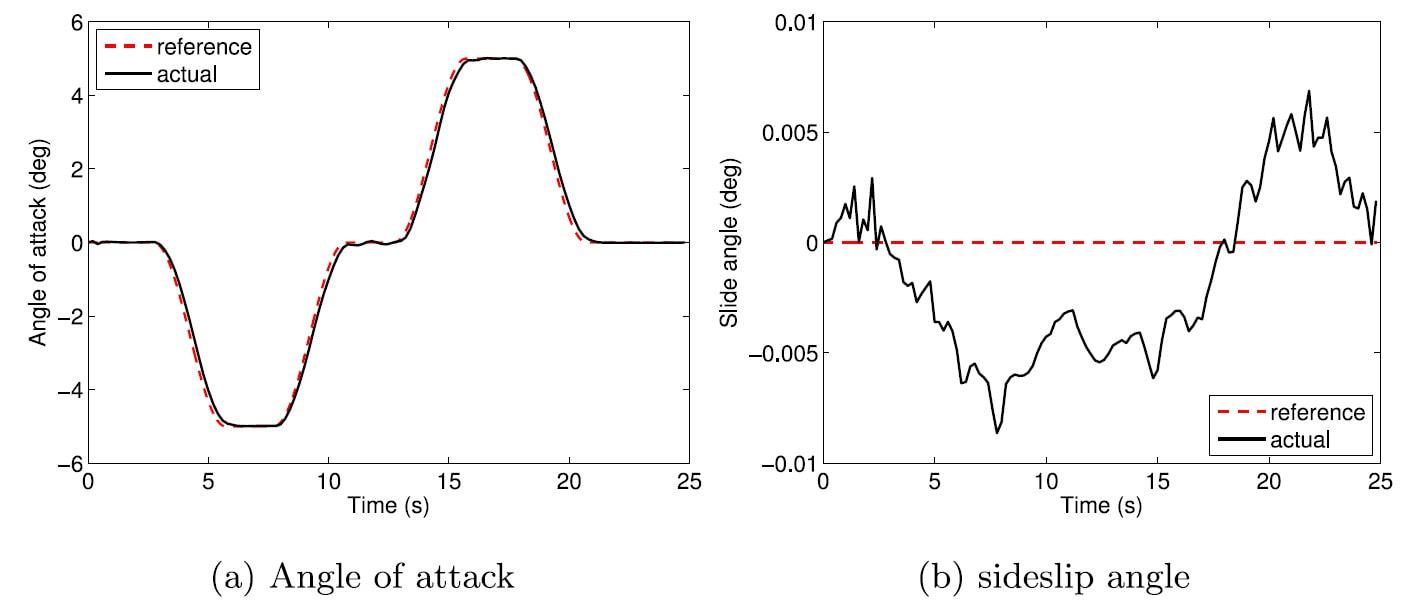
Fig 12. Flight test results (see more details in above publication)
|
2019 Flight testing of advanced controllers in DLR's EAGLE autonomous VTOL demonstrator

Fig 13. DLR's EAGLE(Environment for Autonomous GNC Landing Experiments).

Fig 14. DLR EAGLE testing platform
|
This work was performed at the University of Bristol.
In collaboration with DLR-Bremen, and as part of an ESA-funded PhD, in the last phase of the PhD we successfully flight tested an advanced controller in DLR's EAGLE (Environment for Autonomous GNC Landing Experiments), see Fig. 13 and 14. A preliminary load-relief estimator and compensator was also implemented and flight tested. The robust controller was designed using structured H-infinity, and followed our work on thrust-vector-control (TVC) for the VEGA launcher. The tests successfully showed the capability of the robust controller to maintain position of EAGLE despite strong wind perturbations (up to 6 m/s, see results in Fig. 15). Publication: Simplício, P., Marcos, A., Bennani, S., “New Control Functionalities for Launcher Load Relief in Ascent and Descent Flight,” 8th European Conference for Aeronautics and Space Science (EUCASS 2019), Madrid, SP, July 2019 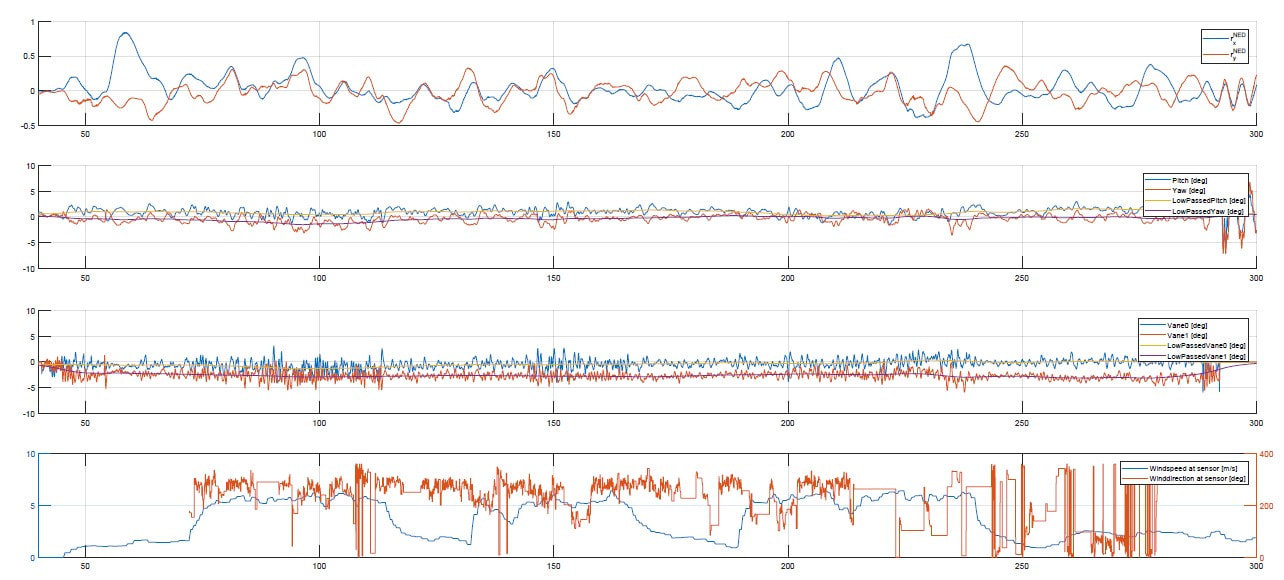
Fig 15. Flight test results for robust controller
|